期刊介绍

一种新型制动辅助系统的驱动方案
【作者】:网站采编
【关键词】:
【摘要】一种新型制动辅助系统的驱动方案 王 潇 1 郭有贵 1 肖 曦 2 李楚韵 1 (1. 湘潭大学信息工程学院 湘潭 411105 2. 清华大学电机工程与应用电子技术系 北京 100084) 摘要 制动辅助系统作为汽
一种新型制动辅助系统的驱动方案
摘要 制动辅助系统作为汽车制动系统中的一种重要辅助环节,其控制的速度、稳定性对于汽车驾驶的安全性至关重要。针对一种新型制动辅助系统,根据传动需求筛选出最优的控制策略,然后结合实际电机参数,建立传动系统仿真模型。在仿真模型的基础上,综合考虑汽车空间利用率及装配便利性问题,设计电机驱动器,最终形成一套完整的电机驱动解决方案。仿真和实验结果验证了该方案的可行性。
关键词:制动辅助系统 永磁同步电机 电机驱动器 制动系统
0 引言
为了缩短汽车制动距离,工程师提出了制动辅助系统。随着电力电子技术的不断发展,制动辅助系统也由机械式发展为电子式,相比较于前者,电子式制动辅助系统更加高效、智能。目前,制动辅助系统已经成为绝大部分汽车出厂的标准配置。市场上主流的制动辅助系统构成,基本可以概括为直流电机/无刷直流电机和机械传动机构的搭配,实现力矩放大、辅助制动的目的[1-4]。
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)结构简单,功率密度大,效率高,与直流电机相比,没有换向器和电刷,可靠性高;与异步电机相比,不需要无功励磁电流,因而功率因数高;此外,其力矩惯量比大,定子电流和定子电阻损耗较小,且转子参数可测、控制性能好[5-7]。而且,近几十年,永磁材料性能的改善、电力电子功率器件的发展和数字信号处理芯片处理能力的提高及交流电机矢量控制系统在永磁同步电机控制系统中的应用,使永磁同步电机能够实现高精度、高动态性能、大范围调速或定位控制,进而在中小容量的高精度传动领域得到了广泛应用[8-10]。
国际著名厂商博世集团和大陆集团,分别推出了各自的制动辅助系统解决方案[11]。中国的几个主要制动系统生产商,虽然在ABS和车身稳定控制领域发展迅速,但是均未在制动辅助系统领域有所布局。目前,已有国内高校和企业开始在这个领域进行研究,本文便是在该情况下,针对一种利用特殊结构永磁同步电机和一级滚珠丝杠传动的集成制动辅助系统,通过分析实际需求及应用环境,设计一套电机驱动方案,对永磁同步电机进行高精度、高效率控制,进而实现制动辅助系统的功能。通过仿真和实验,证明了该新型制动辅助系统电机驱动方案的可行性。
1 永磁同步电机控制原理
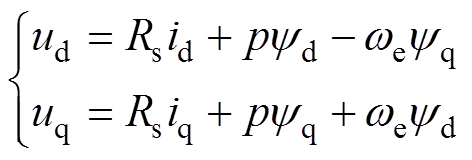
通过坐标变换,永磁同步电机模型可以简化为以下形式[12-15]。
电压方程为
 (1)
(1)
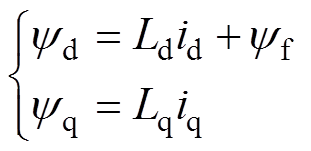
定子磁链方程为
控制模块主要包含控制芯片、采样调理电路、通信模块、存储模块等。控制模块连接了电压电流采样模块、解码器模块,并且负责与上位机的通信。实验中,为方便测定实验样机相关性能,未连接滚珠丝杠部件,而是额外增加了一个连接部件,以实现与测功机的连接。实验平台如图9和图10所示。
 (2)
(2)
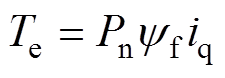
电磁转矩方程为
 (3)
(3)
由图7可见,电机的输出转速可以在给定转速指令变化后10个控制周期内实现响应,同时在给定转速稳定后的100个控制周期(Ts=0.1ms)内实现转速稳定,且稳态误差较小。由三相电流波形可以看出,在转速变化时,电流会有短时的冲击现象,但时间及幅值均在电机及器件额定范围内;稳态情况下,三相电流波形平稳,正弦度较高。
(1)玉米秸秆淀粉添加量对膜抗拉强度和变形率的影响。分别称取玉米秸秆淀粉添加量2g、4g、6g、8g、10g,再称取聚乙烯醇6g,加入适量蒸馏水后再量取4mL甘油于烧杯中,其他试验操作顺序按照1.3.1和1.3.2中的试验流程进行。
图5中上方为踏板位移的加速度计算及量化模型,同时加入滤波环节,使位移的加速度输出更加平滑;下方为踏板位移量化模型。位移及位移加速度经过量化后,作为速度给定状态表的选择变量。从图6的输入输出波形可以看出,在位移上升及下降阶段,位移加速度的抖动较为剧烈,引入滤波环节后,加速度波形较为平滑;速度给定呈阶梯形变化,不存在明显抖动,且速度给定与实际制动工况需求相符合,证明了该意图识别模型的可行性及可靠性。
 (4)
(4)
可以看出,如果维持id=0,则PMSM的电磁转矩仅与iq相关。因此,在id=0控制策略中,通过坐标变换,可以使PMSM多变量、非线性、强耦合的电磁转矩关系模型等效为简单的直流电机电磁转矩关系模型。综上所述,将直流电机的相关控制策略应用到PMSM的控制中,不仅可以大大简化PMSM的控制思路,而且更好地提高了PMSM的控制性能。图1为常见的id =0控制策略框图。
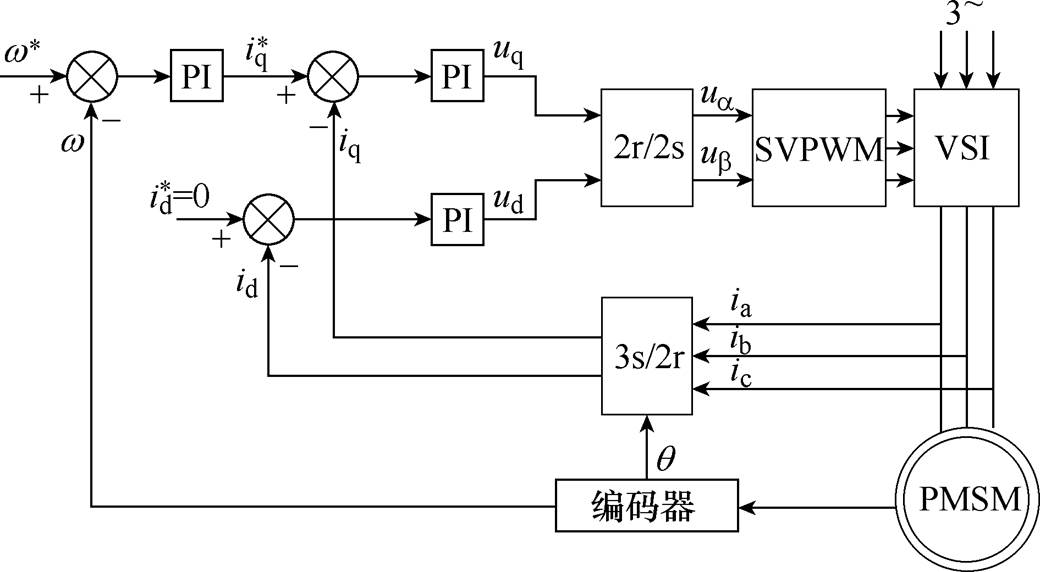
图1 永磁同步电机id=0控制策略框图
Fig.1 id=0 control strategy block diagram of PMSM
2 新型制动辅助系统构成
2.1 电机驱动及传动部件构成
根据实际需求,提出相应的驱动器设计方案[7-8],如图3所示。
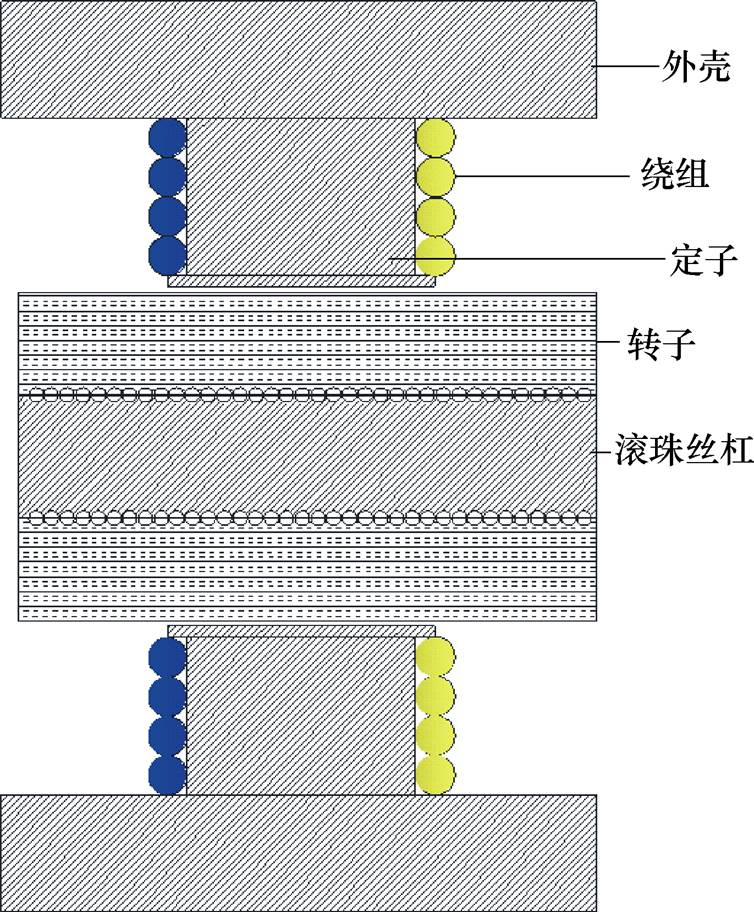
图2 系统示意图
Fig.2 System schematic
范坚强点点头。雪萤身后那名男子把她手腕上的绳索解开。雪萤揉了揉手腕,跑上去抱着一杭的脖子,泣不成声。范坚强拿茶杯盖在茶几上敲着,说:“有话快说,别磨蹭!”
驱动电机采用转子中空的设计方案,使其中间可以安装滚珠丝杠,进而利用滚珠丝杠完成力矩的直线传递,实现辅助制动的功能。系统中滚珠丝杠后部的连接部件与本文探讨内容关联性不大,此处便不再详述。
从图2及以上的分析可以得出,通过控制驱动电机快速跟随上层给定指令,可以利用滚珠丝杠的传递作用,将驾驶人作用在踏板上的力进行放大,进而传递给主缸,实现辅助制动。
2.2 驱动器设计
在进行市场调研和技术分析的基础上,提出一种基于永磁同步电机的新型制动辅助系统驱动方案。该系统由永磁同步电机作为驱动部件,滚珠丝杠作为传动部件,将旋转的力矩转变为直线传递,进而作用于制动主缸,实现辅助制动的功能。基于汽车空间利用率、部件装配便利性以及系统功能实现等方面的考虑,提出一种新型电机及系统构成方案。系统的简单示意图如图2所示。
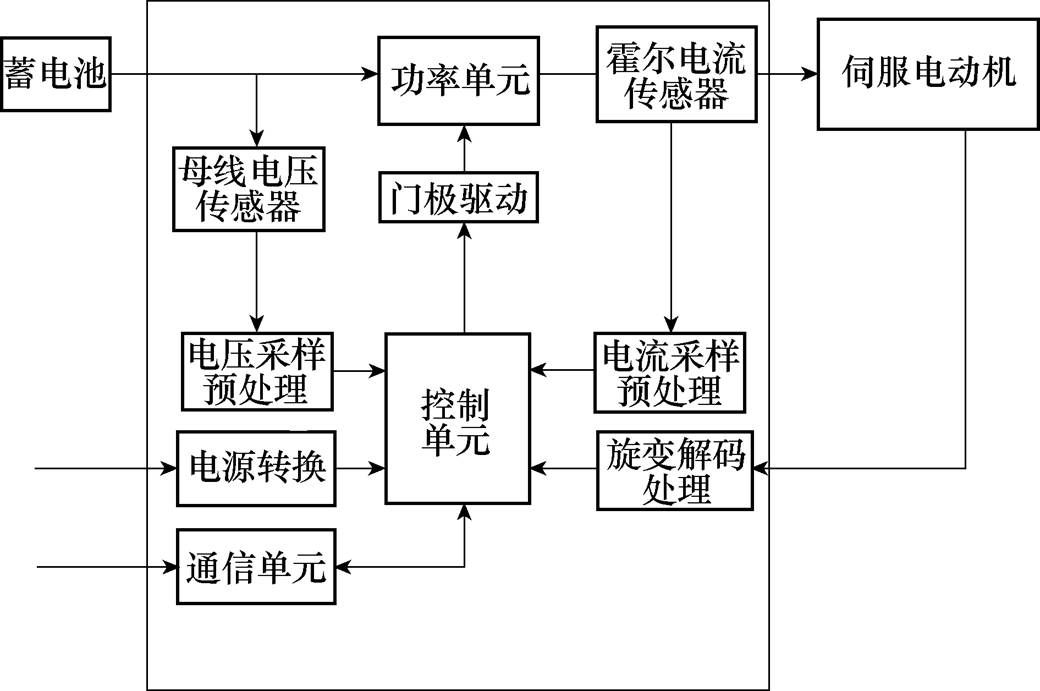
图3 驱动器方案
Fig.3 Drive scheme
驱动器主要包括控制单元、电压电流采样单元、电源转换单元、旋变解码单元以及通信单元。控制单元采用了TI公司DSP芯片TMS320F28335作为主控制芯片;旋变解码单元负责将旋转变压器的输出信号进行解码处理,并传输给控制单元;通信单元负责与上层控制单元的通信,实现指令的接收与发送。
3 驱动系统仿真研究
利用Matlab/Simulink对PMSM基于id= 0的矢量控制策略进行仿真验证。仿真结构如图4所示。仿真参数按照实际驱动电机及驱动器参数设定,见表1。
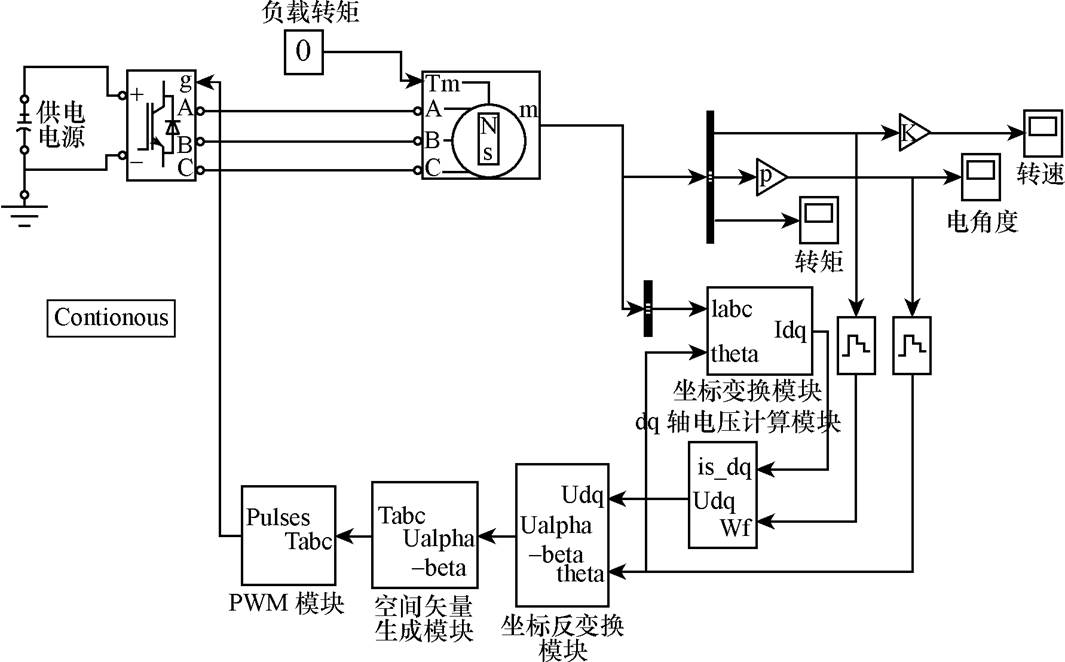
图4 永磁同步电机驱动器矢量控制仿真
Fig.4 Vector control simulation of PMSM driver
表1 驱动器矢量控制仿真参数
Tab.1 Driver vector control simulation parameters
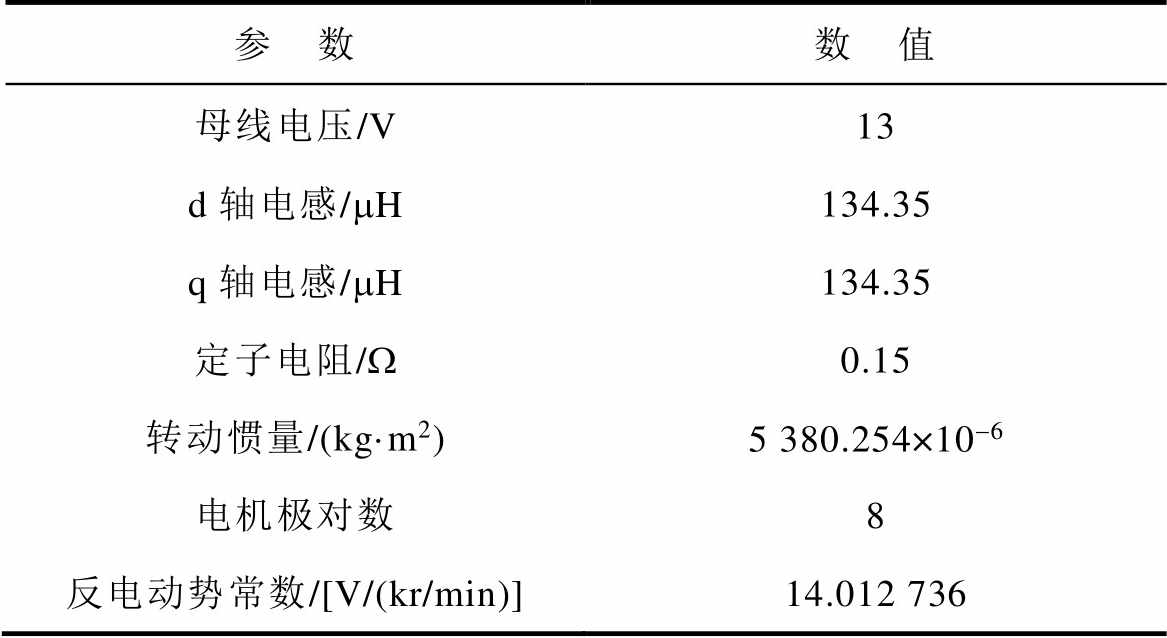
参 数数 值 母线电压/V13 d轴电感/mH134.35 q轴电感/mH134.35 定子电阻/W0.15 转动惯量/(kg·m2)5 380.254×10-6 电机极对数8 反电动势常数/[V/(kr/min)]14.012 736
为了模拟制动助力过程,仿真中引入车辆实际制动工况数据,包括踏板位移、制动主缸压力等数据。首先,准确识别驾驶人的踩踏意图,因此需要对踏板位移及加速度进行分析,并建立相应的模型。本文采用位移和位移加速度的二维模型进行意图判别,即在不同的踏板位移情况下,结合加速度的方向及大小输出不同的速度给定指令,踩踏意图识别仿真模型及输出如图5和图6所示。
基于此,笔者根据人性化设计理念设计了一款小型作物根部施肥器,如图1所示。本设计方案结构简单,操作方便。操作者将施肥器插入作物根部附近的土壤内,如果土表较硬可通过脚踏板附加施力,同时踏板高度可调节,以配合不同施肥深度的要求。当下料管插入土壤后,提起施肥拉杆,料斗内的化肥通过料斗下料口依靠自重自动流入到下料管,继而通过下料管口下落至土壤深孔内,推回施肥拉杆使料斗下料口关闭,拔出施肥器,完成一次施肥操作。土壤深孔内的化肥通过孔周边泥土的下滑或操作者的踩压得到覆盖,可防止挥发。
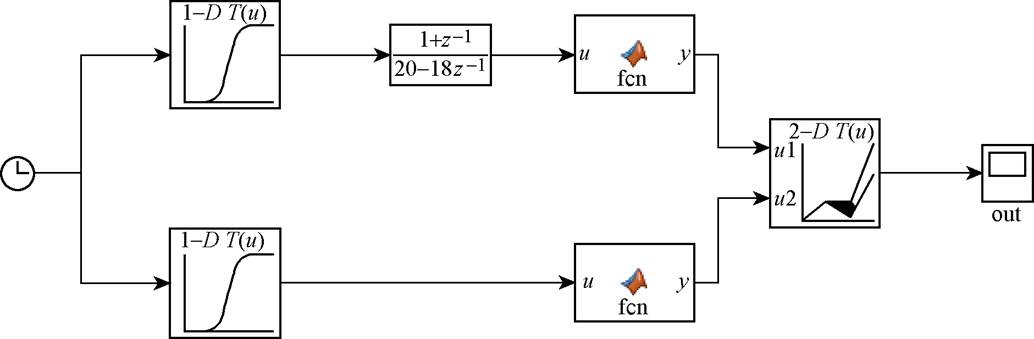
图5 踩踏意图识别模型
Fig.5 Stepping on the intent recognition model
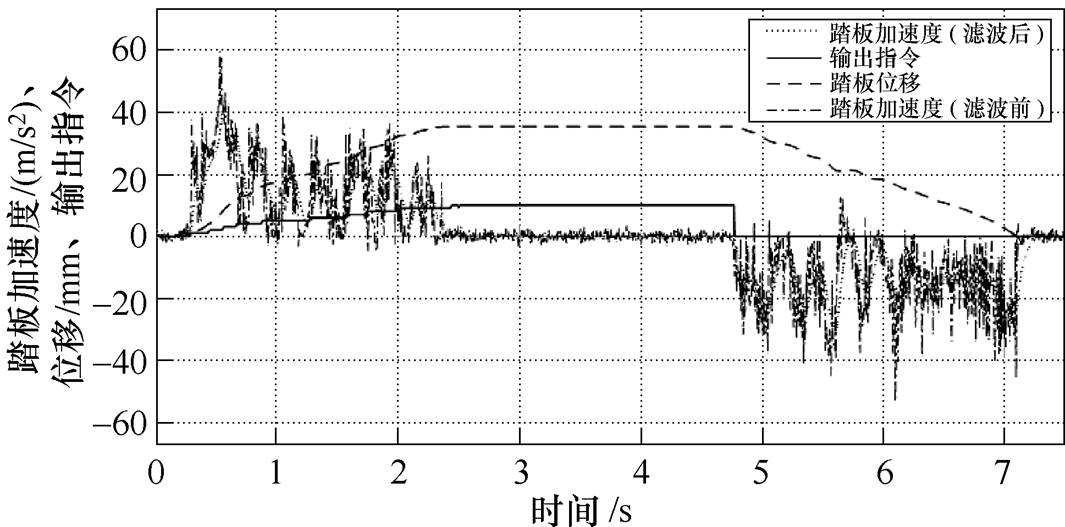
图6 踩踏意图识别模型输入输出波形
Fig.6 Input and output waveforms of stepping on the intent recognition model
式(3)等号右边的第一项是由定子电流和永磁体磁链相互作用产生的转矩,称为电磁转矩;第二项是转子凸极效应产生的转矩,称为磁阻转矩。可见,对于表贴式PMSM,Ld=Lq,式(3)仅保留第一项得
仿真中,将电机的初始负载转矩设定为1.0N·m,根据上述踩踏意图辨识结果输出速度指令。
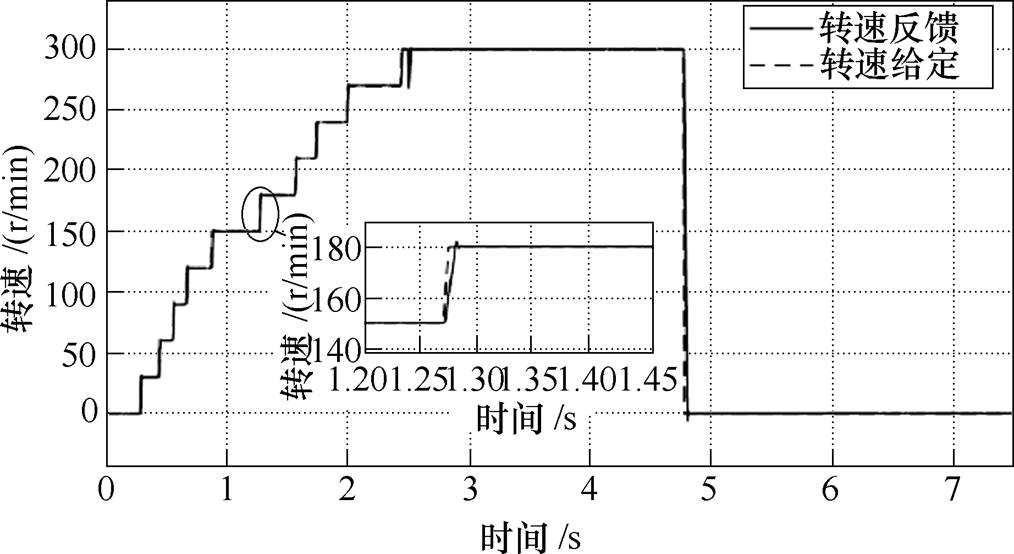
图7 转速上升波形
Fig.7 Rising speed waveforms

图8 三相电流波形
Fig.8 Three-phase current waveforms
式中,ud、uq,id、iq,Ld、Lq,yd、yq分别为d、q轴电压、电流、电感以及磁链;Rs为定子电阻;we为电角速度(rad/s);yf为永磁体磁链(Wb);Pn为电机极对数;p为微分算子。
4 实验结果及分析
根据上述驱动器需求,结合仿真研究,搭建基于永磁同步电机的新型制动辅助系统驱动实验平台,进行实验验证及分析。
(1)从整体视角上看,整个研究期间中国建筑业TFP累计增长65.34%,年平均复合增长率为7.45%。
为了研究船员疲劳,设计基于MFI-20设计船员疲劳问卷,分别对MFI-20五维和NASA-TLX六维进行有效收集的数据进行分析,结果表明船员中普遍存在疲劳现象。为进一步研究造成船员疲劳的影响因素,引入了EFA并得到了8个探索性因子。基于EFA的结果,建立结构方程模型,得出了探索性因子与船员疲劳的相关性,“物理工作环境”,“休息情况”和“工作节奏”等3个因子对船员疲劳程度的影响最为直接。所使用的方法可用于研究船员的疲劳,帮助船舶管理公司和相关管理部门有针对性地制订疲劳管理制度,通过减少任务负荷,适当的休息时间和改善工作的物理环境来提高船员的表现,切实提高船舶航行安全水平。
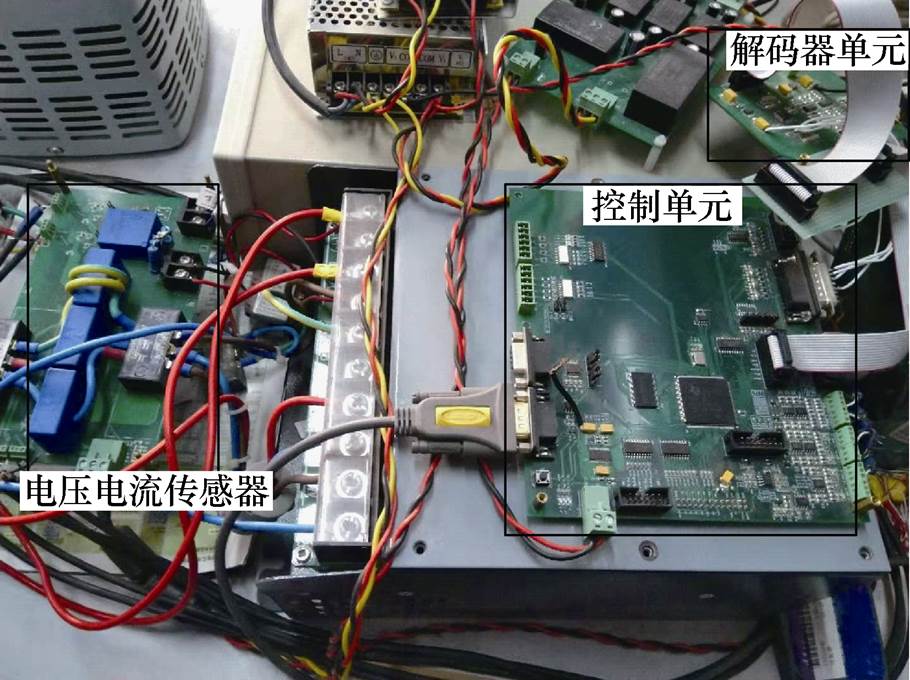
图9 实验平台
Fig.9 Experiment platform
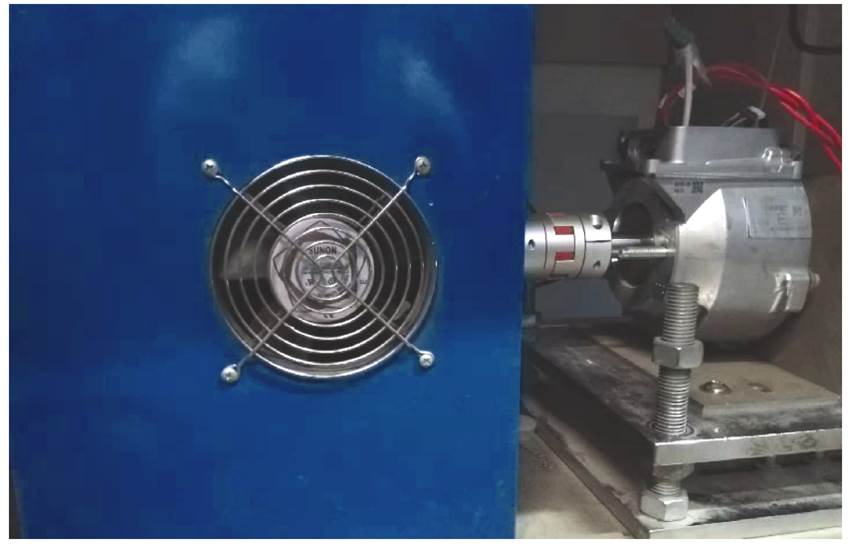
图10 电机及测功机
Fig.10 Motor and dynamometer
实验中,利用测功机控制器设定初始给定负载转矩,TL=1.0N·m,并保持不变。将电机由静止状态起动,速度给定按照表2变化。转速及电流波形变化如图11~图13所示。
表2 速度给定变化表
Tab.2 Speed given change table
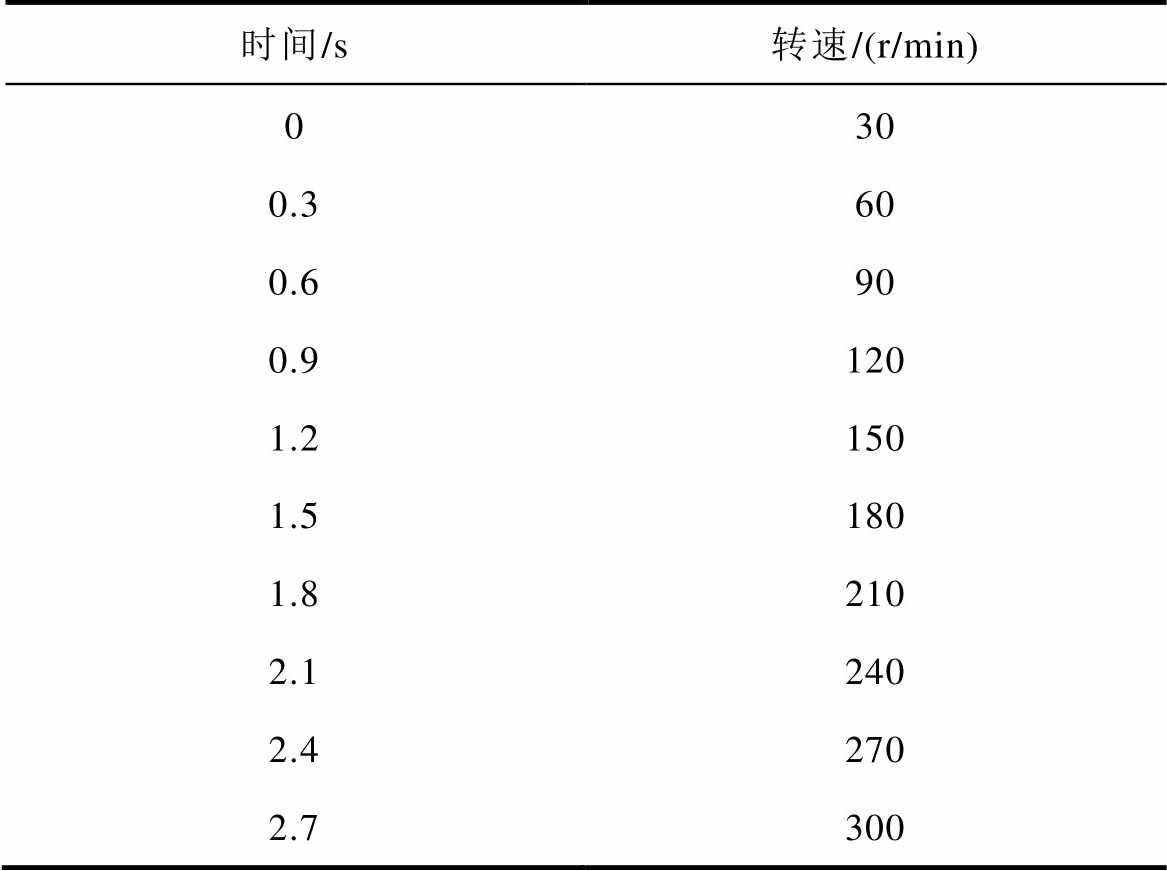
时间/s转速/(r/min) 030 0.360 0.690 0.9120 1.2150 1.5180 1.8210 2.1240 2.4270 2.7300
在DSP程序中创建速度录波数组,主程序中速度采样频率为1kHz,但考虑到运算器的存储空间及运算能力,录波频率设定为200Hz,实验完成后,利用录波数据绘制转速波形,如图11所示。由转速波形可以看出,当给定指令变化时,转速有一定程度的超调,约0.3s的动态响应过程后速度达到稳态,稳态误差小于1.0%。
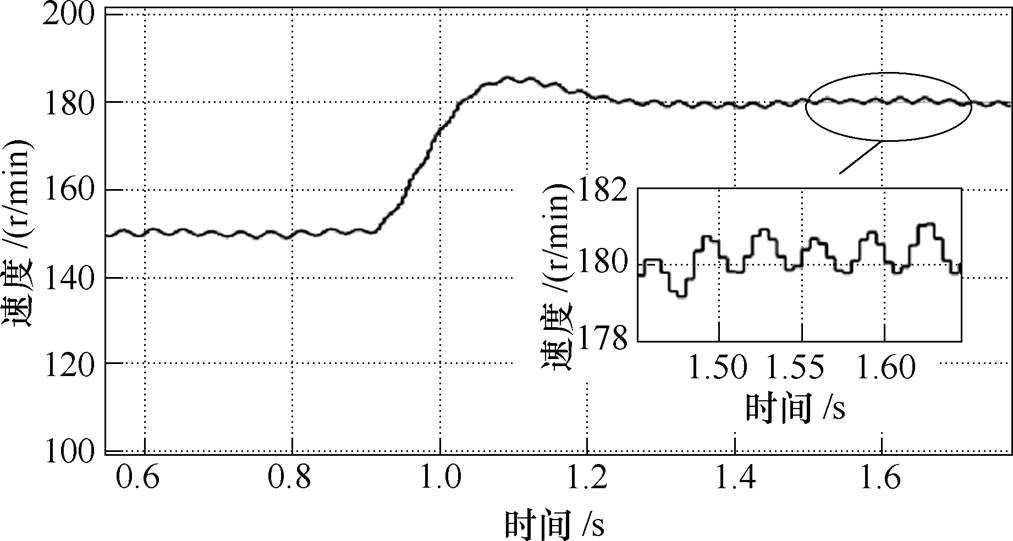
图11 转速波形
Fig.11 Speed waveform
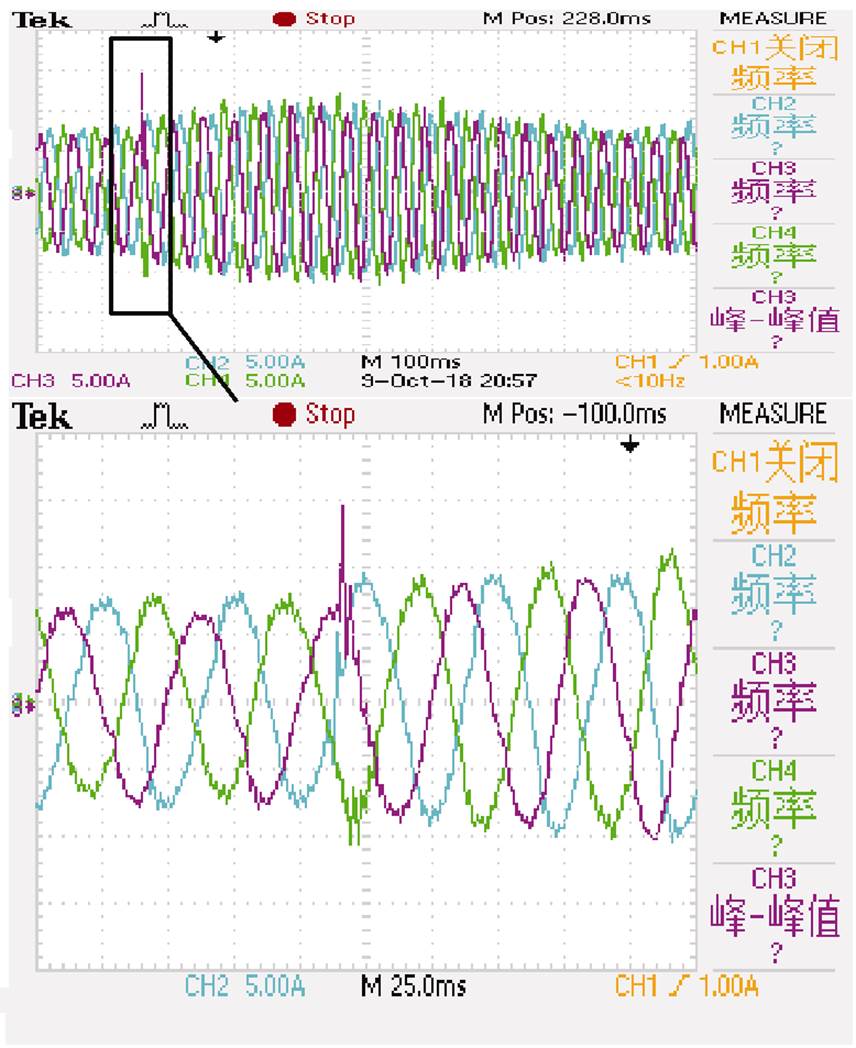
图12 转速切换过程三相电流波形
Fig.12 Three-phase current waveforms during speed switching
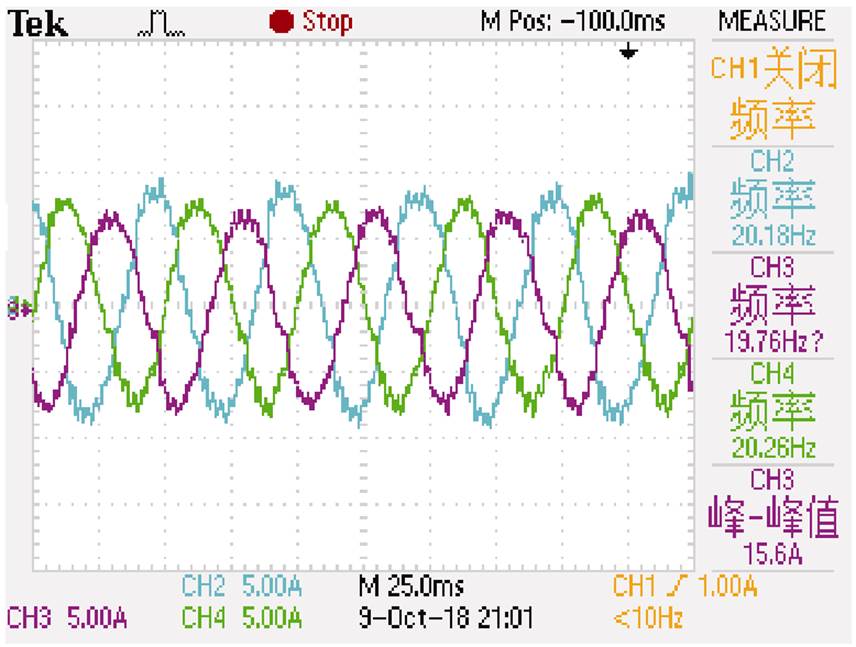
图13 稳态三相电流波形
Fig.13 Steady-state three-phase current waveforms
由切换过程三相电流波形可以看出,相比较于仿真研究,实验中切换过程冲击电流幅值小、时间短。同时,从图13稳态三相电流波形可以看出,稳态情况下,电机稳态电流要稍小于10A,且三相电流整体平稳,正弦度较高,从而证明本文所提驱动方案的可行性。
5 结论
针对一种新型制动辅助系统,提出一套完整的电机驱动方案。相比较于市场上的已有产品,该解决方案具有集成度更高、传动更便利的特点。仿真和实验结果表明,本文所提驱动方案具有响应速度快、稳定性高的特点,可以实现驱动电机快速跟随上层控制指令,完成系统的实际功能。该驱动方案为制动辅助系统的实现提供了一种新的思路,同时为永磁同步电机提供了新的应用场景。
[17]Meara,P.,&Buxton,B.(1987).An alternative to multiple choice vocabulary tests.Language Testing,4,142-154.
参考文献
[1] 博斯(Bose B K). 现代电力电子学与交流传动[M]. 王聪, 等译. 北京: 机械工业出版社, 2005.
[2] 饶裕, 刘杨, 齐彪, 等. 直驱式系统中交流调速系统的设计[J]. 自动化技术与应用, 2017, 36(7): 13-16.
Rao Yu, Liu Yang, Qi Biao, et al. Design of AC speed-regulating system applied in direct drive system[J]. Techniques of Automation & Applications, 2017, 36(7): 13-16.
[3] 张艳辉, 徐坤, 郑春花, 等. 智能电动汽车信息感知技术研究进展[J]. 仪器仪表学报, 2017, 38(4): 794-805.
Zhang Yanhui, Xu Kun, Zheng Chunhua, et al. Advanced research on information perception technologies of intelligent electric vehicles[J]. Chinese Journal of Scientific Instrument, 2017, 38(4): 794-805.
[4] 曲荣海, 秦川. 电动汽车及其驱动电机发展现状与展望[J]. 南方电网技术, 2016, 10(3): 82-86.
Qu Ronghai, Qin Chuan. Development status and prospects of electric vehicles and their drive motors[J]. Southern Power System Technology, 2016, 10(3): 82-86.
[5] 王东文, 李崇坚, 吴尧, 等. 永磁同步电机的模型预测电流控制器研究[J]. 电工技术学报, 2014, 29(增刊1): 73-79.
Wang Dongwen, Li Chongjian, Wu Yao, et al. Model predictive current control scheme for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society, 2014, 29(S1): 73-79.
[6] 薛梦觉, 康劲松, 魏俊天, 等. 电动汽车IPMSM驱动控制技术[J]. 电源学报, 2014,12(1): 28-34.
Xue Mengjue, Kang Jinsong, Wei Juntian, et al. Control strategy for IPMSM of electric vehicle driving system[J]. Journal of Power Supply, 2014, 12(1): 28-34.
[7] 徐艳平, 王极兵, 张保程, 等. 永磁同步电机三矢量模型预测电流控制[J]. 电工技术学报, 2018, 33(5): 980-988.
Xu Yanping, Wang Jibing, Zhang Baocheng, et al. Three-vector-based model predictive current control for permanent magnet synchronous motor[J]. Transa- ctions of China Electrotechnical Society, 2018, 33(5): 980-988.
[8] Dai Ying, Song Liwei, Cui Shumei. Development of PMSM drives for hybrid electric car applications[J]. IEEE Transactions on Magnetics, 2007, 43(1): 434- 437.
[9] 鲁家栋, 刘景林, 卫丽超. 永磁同步电机转子初始位置检测方法[J]. 电工技术学报, 2015, 30(7): 105-111.
Lu Jiadong, Liu Jinglin, Wei Lichao. Estimation of the initial rotor position for permanent magnet synchronous motors[J]. Transactions of China Elec- trotechnical Society, 2015, 30(7): 105-111.
[10] 李永东, 朱昊. 永磁同步电机无速度传感器控制综述[J]. 电气传动, 2009, 39(9): 3-10.
Li Yongdong, Zhu Hao. Overview of sensorless control of permanent magnet syncoronous motors[J]. Electric Drive, 2009, 39(9): 3-10.
[11] 孙志国. 天籁车刹车辅助系统的检修[J]. 生物技术世界, 2013(11): 139.
Sun Zhiguo. Overhaul of the brake assist system of the Teana[J]. Biotech World, 2013(11): 139.
[12] 陈磊, 李洪章. 永磁同步电机的结构特点分析[J].电站系统工程, 2011, 7(4): 34.
Chen Lei, Li Hongzhang. Structure and characteristic analysis for PMSM[J]. Power System Engineering, 2011, 7(4): 34.
[13] 徐文伟. 永磁同步电机矢量控制的实现[D]. 广州:华南理工大学, 2013.
[14] 张永昌, 杨海涛, 魏香龙. 基于快速矢量选择的永磁同步电机模型预测控制[J]. 电工技术学报, 2016, 31(6): 66-73.
Zhang Yongchang, Yang Haitao, Wei Xianglong. Model predictive control of permanent magnet synchronous motors based on fast vector selection[J]. Transactions of China Electrotechnical Society, 2016, 31(6): 66-73.
[15] 刘计龙, 肖飞, 沈洋, 等. 永磁同步电机无位置传感器控制技术研究综述[J]. 电工技术学报, 2017, 32(16): 76-88.
Liu Jilong, Xiao Fei, Shen Yang, et al. Position- sensorless control technology of permanent-magnet synchronous motor-a review[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 76-88.
Drive Scheme of a New Brake Assist System
Abstract As an important auxiliary link in the car brake system, the brake assist system is fast and stable, which is very important for the safety of car driving. For a new type of brake assist system, the optimal control strategy is selected according to the transmission requirements, and then the actual motor parameters are combined to establish the transmission system simulation model. On the basis of the simulation model, considering the reasonable utilization of the automobile assembly space and the ease of assembly, the motor driver is designed to complete a complete motor drive solution. Simulation and experimental results verify the feasibility of the scheme.
keywords:Brake assist system, permanent magnet synchronous motor (PMSM), motor drives, braking system
中图分类号:TM351
DOI: 10.19595/j.cnki.1000-6753.tces.L80672
国家自然科学基金(51577095)和清华大学自主科研计划资助。
收稿日期2018-07-08
改稿日期 2018-12-03
王 潇 男,1992年生,硕士研究生,研究方向为电力电子及电力传动。E-mail: hiwongshawn@gmail.com
2.2 3组病例手术时间、术中出血量对比研究 从表2可以看出,3组病例间手术时间、术中出血量差异无统计学意义(P>0.05),3组病例手术时间及术中出血量基本无区别,所以,从手术时间、术中出血量上不会对后期3组不同切口处理方法造成影响。见表2。
郭有贵 男,1968年生,博士,教授,研究方向为电力电子与电力传动、电机控制、新能源研究等。E-mail: 719983182@qq.com(通信作者)
在平面直角坐标系中,圆C1:(x+1)2+(y-6)2=25,圆C2:(x-17)2+(y-30)2=r2.
(编辑 赵 鹏)
文章来源:《电工技术学报》 网址: http://www.dgjszzs.cn/qikandaodu/2020/0521/334.html
上一篇:没有了
下一篇:偏心状态下的轴向磁通永磁电机受力分析
电工技术学报投稿 | 电工技术学报编辑部| 电工技术学报版面费 | 电工技术学报论文发表 | 电工技术学报最新目录
Copyright © 2018 《电工技术学报》杂志社 版权所有
投稿电话: 投稿邮箱: